
コンテンツ
速度は、特定の方向におけるオブジェクトの速度として定義されます。多くの場合、速度を見つけるには、式v = s / tを使用します。ここで、vは速度、sは元の位置からのオブジェクトの変位の合計距離、tはオブジェクトが移動するのにかかる時間です。ずっと行きます。ただし、理論的には、この式は速度のみを対象としています。 中 途中で物事の。距離に沿った任意の瞬間におけるオブジェクトの速度を計算することによって。あれは 輸送時間 そして次の式で定義されます v =(ds)/(dt)、言い換えれば、それは平均速度の方程式の導関数です。
手順
パート1/3:瞬間速度を計算する
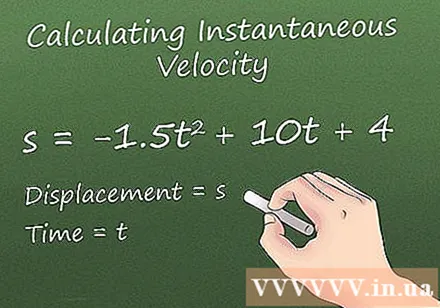
変位距離によって速度を計算するための方程式から始めます。 瞬間的な速度を見つけるには、最初に、任意の瞬間におけるオブジェクトの位置(変位の観点から)を示す方程式が必要です。つまり、方程式には1つの変数のみが必要です S 片側に回して t 反対側(必ずしも1つの変数だけではありません)のように:s = -1.5t + 10t + 4
- この式では、変数は次のとおりです。
- s =変位。オブジェクトが元の位置から移動した距離。たとえば、オブジェクトが前方に10メートル、後方に7メートル歩くことができる場合、その合計移動距離は10-7 =です。 3メートル (10 + 7 = 17mではありません)。
- t =時間。この変数は説明がなく単純で、通常は秒単位で測定されます。
- この式では、変数は次のとおりです。

方程式の導関数を取ります。 方程式の導関数は、特定の時間における距離の傾きを示す別の方程式です。変位距離によって方程式の導関数を見つけるには、次の一般的な規則に従って関数の微分を取り、導関数を計算します。 y = a * xの場合、派生= a * n * x。これは、方程式の「t」側のすべての項に適用されます。- 言い換えれば、方程式の「t」側で左から右への微分を取得し始めます。変数「t」に遭遇するたびに、指数を1で減算し、その項に元の指数を乗算します。定数項(「t」のない項)は、0が乗算されるため、表示されなくなります。プロセスは思ったほど難しくありません。上記のステップの式を例として取り上げましょう。
s = -1.5t + 10t + 4
(2)-1.5t +(1)10t +(0)4t
-3t + 10t
-3t + 10
- 言い換えれば、方程式の「t」側で左から右への微分を取得し始めます。変数「t」に遭遇するたびに、指数を1で減算し、その項に元の指数を乗算します。定数項(「t」のない項)は、0が乗算されるため、表示されなくなります。プロセスは思ったほど難しくありません。上記のステップの式を例として取り上げましょう。
「s」を「ds / dt」に置き換えます。 新しい方程式が元の正方形の導関数であることを示すために、「s」を記号「ds / dt」に置き換えます。理論的には、この表記は「tに関するsの導関数」です。この表記を理解するためのより簡単な方法であるds / dtは、初期方程式の任意の点の傾きです。たとえば、時間t = 5で式s = -1.5t + 10t + 4で表される距離の傾きを見つけるには、式の導関数のtを「5」に置き換えます。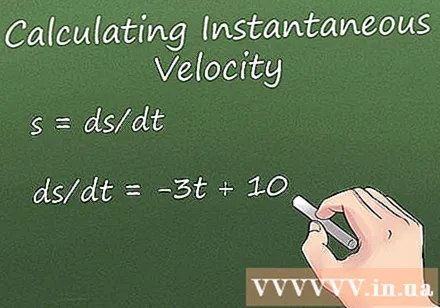
- 上記の例では、方程式の導関数は次のようになります。
ds / dt = -3t + 10
- 上記の例では、方程式の導関数は次のようになります。
tの値を新しい方程式に代入して、瞬間速度を求めます。 微分方程式ができたので、任意の瞬間の瞬間速度を見つけるのは非常に簡単です。あなたがする必要があるのは、t値を選択し、それを微分方程式に置き換えることです。たとえば、t = 5での瞬間速度を求めたい場合は、微分方程式ds / dt = -3t +10のtを「5」に置き換えるだけです。次のように方程式を解きます。
ds / dt = -3t + 10
ds / dt = -3(5)+ 10
ds / dt = -15 + 10 = -5メートル/秒- 上記の「メートル/秒」の単位を使用していることに注意してください。メートル単位の変位と秒単位の時間の問題を解決しているので、速度は正確に時間の変位であるため、このユニットが適しています。
パート2/3:瞬間速度をグラフィカルに推定する
時間の経過に伴うオブジェクトの移動距離をグラフ化します。 上記のセクションで、導関数は、導関数から取得した方程式の任意の点で勾配を見つけることを可能にする式でもあると述べました。実際、オブジェクトの移動距離をグラフで表示すると、 任意のポイントでのグラフの傾きは、そのポイントでのオブジェクトの瞬間速度です。.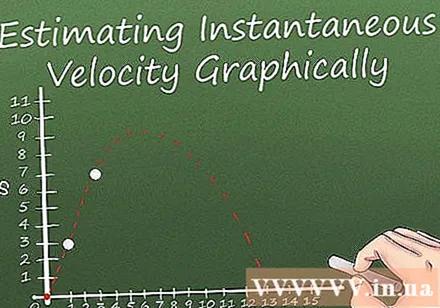
- 移動距離をグラフ化するには、x軸を時間に、y軸を変位に使用します。次に、tの値をモーション方程式に差し込むことによってポイントの数を決定し、結果はsの値になり、グラフ上のポイントt、s(x、y)にドットを付けます。
- グラフがx軸より下に伸びている場合があることに注意してください。オブジェクトの動きを示す線がx軸を下る場合、これはオブジェクトが元の位置から後方に移動することを意味します。一般に、グラフはy軸の後ろに伸びることはありません。通常、時間的に戻るオブジェクトの速度は測定しません。
グラフ上の点Pと点Pの近くにある点Qを選択します。 点Pでのグラフの傾きを見つけるために、「限界検出」の手法を使用します。限界を見つけるということは、曲線上の2つのポイント(PとQ(Pに近いポイント))を取り、それらの2つのポイントを結ぶ線の傾きを見つけ、PとQの間の距離が短くなるにつれてこのプロセスを繰り返すことを意味します。徐々に。
- 変位距離に点(1; 3)と(4; 7)があるとします。この場合、(1; 3)で勾配を見つけたい場合は、次のように設定できます。 (1; 3)= P そして (4; 7)= Q.
PとQの間の勾配を見つけます。 PとQの間の勾配は、PとQのx値の差に対するPとQのy値の差です。言い換えると、 H =(yQ -yP) / (バツQ - バツP)、ここで、Hは2点間の勾配です。この例では、PとQの間の勾配は次のとおりです。
H =(yQ -yP) / (バツQ - バツP)
H =(7-3)/(4-1)
H =(4)/(3)= 1,33
QをPに近づけて、数回繰り返します。 目標は、PとQの間の距離を、それらが1点に達するまで狭めることです。 PとQの間の距離が小さいほど、その無限に小さいセグメントの勾配は、点Pの勾配に近くなります。点(2; 4)を使用して、この例の式に対して数回繰り返します。 、8)、(1.5; 3.95)および(1.25; 3.49)はQを与え、Pの初期座標は(1; 3)です。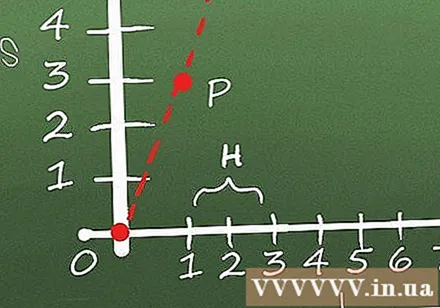
Q =(2; 4.8): H =(4.8-3)/(2-1)
H =(1.8)/(1)= 1,8
Q =(1.5; 3.95): H =(3.95-3)/(1.5-1)
H =(0.95)/(0.5)= 1,9
Q =(1.25; 3.49): H =(3.49-3)/(1.25-1)
H =(0.49)/(0.25)= 1,96
グラフ曲線上の非常に小さいセグメントの勾配を推定します。 QがPに近づくにつれて、Hは徐々にPの勾配に近づきます。最後に、非常に小さい線では、HがPの勾配になります。測定または計算できないためです。線の長さは非常に短いため、計算した点からはっきりと見える場合にのみ、Pでの勾配を推定します。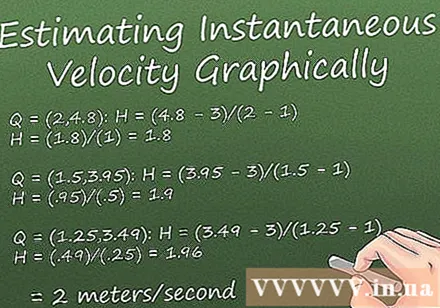
- 上記の例では、HをPに近づけると、Hの値は1,8になります。 1.9および1.96。これらの数値は2に近づいているので、次のように言えます。 2 はPでの勾配の概算値です。
- グラフの任意のポイントの勾配は、そのポイントのグラフ方程式の導関数であることに注意してください。前のセクションで見たように、グラフは時間の経過に伴うオブジェクトの変位を表すため、任意のポイントでのその瞬間速度は、問題ポイントでのオブジェクトの変位距離の導関数です。アクセス、私たちは言うことができます 2メートル/秒 は、t = 1の場合の瞬間速度の概算です。
パート3/3:サンプルの問題
変位方程式s = 5t-3t + 2t +9を使用してt = 1のときの瞬間速度を求めます。 最初のセクションの例と同様ですが、これは2次ではなく3次であるため、同じ方法で問題を解決できます。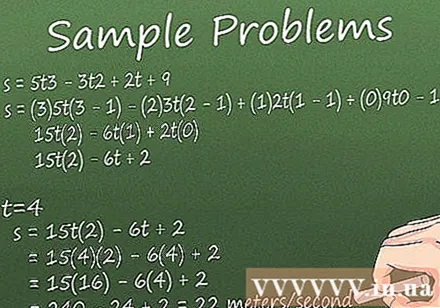
- まず、方程式の導関数を取ります。
s = 5t-3t + 2t + 9
s =(3)5t-(2)3t +(1)2t
15t-6t + 2t-6t + 2 - 次に、t(4)の値を次のように置き換えます。
s = 15t-6t + 2
15(4) - 6(4) + 2
15(16) - 6(4) + 2
240 - 24 + 2 = 毎秒22メートル
- まず、方程式の導関数を取ります。
グラフ推定法を使用して、変位方程式s = 4t --tの(1; 3)での瞬間速度を見つけます。 この問題では、点Pとして座標(1; 3)を使用しますが、その近くにある他のQ点を見つける必要があります。次に、H値を見つけて、推定値を推定するだけです。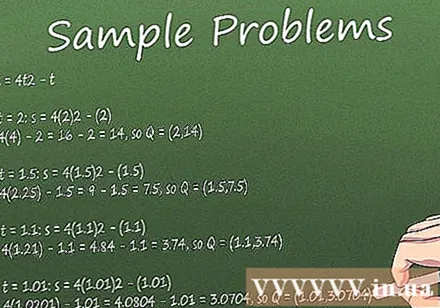
- まず、t = 2のときのQポイントを見つけます。 1.5; 1.1および1.01。
s = 4t-t
t = 2: s = 4(2)-(2)
4(4)-2 = 16-2 = 14、つまり Q =(2; 14)
t = 1.5: s = 4(1.5)-(1.5)
4(2.25)-1.5 = 9-1.5 = 7.5、つまり Q =(1.5; 7.5)
t = 1.1: s = 4(1.1)-(1.1)
4(1.21)-1.1 = 4.84-1.1 = 3.74、つまり Q =(1.1; 3.74)
t = 1.01: s = 4(1.01)-(1.01)
4(1,0201)-1.01 = 4.0804-1.01 = 3.0704、これで終わりです Q =(1.01; 3.0704) - 次に、H値を取得します。
Q =(2; 14): H =(14-3)/(2-1)
H =(11)/(1)= 11
Q =(1.5; 7.5): H =(7.5-3)/(1.5-1)
H =(4.5)/(0.5)= 9
Q =(1.1; 3.74): H =(3.74-3)/(1.1-1)
H =(0.74)/(0.1)= 7,3
Q =(1.01; 3.0704): H =(3.0704-3)/(1.01-1)
H =(0.0704)/(0.01)= 7,04 - H値は7に近いように見えるので、次のように言うことができます 毎秒7メートル は、座標(1; 3)での瞬間速度の概算です。
- まず、t = 2のときのQポイントを見つけます。 1.5; 1.1および1.01。
助言
- 加速度(時間の経過に伴う速度の変化)を見つけるには、パート1の方法を使用して、変位方程式の導関数を取得します。次に、見つけた微分方程式の微分をもう一度取ります。その結果、特定の時点での加速度の方程式が得られます。必要なのは、時間を差し込むだけです。
- Y(変位距離)とX(時間)の相関式は、Y = 6x + 3のように非常に単純です。この場合、勾配は一定であり、次のようにする必要はありません。勾配を計算するための導関数。つまり、線形グラフの場合、Y = mx + bの基本方程式に従います。つまり、勾配は6に等しくなります。
- 変位距離は距離に似ていますが方向があるため、ベクトル量であり、速度はスカラー量です。移動距離は負の場合がありますが、距離は正の場合のみです。



