著者:
Eric Farmer
作成日:
4 行進 2021
更新日:
1 J 2024

コンテンツ
マイレージサービスを頻繁に利用している場合は、おそらくどこかで「待たなければならない」でしょう。待機とは、航空機が他の航空機との衝突を避けるために360度回転するとき、または着陸許可を待っているときです。
これは以前ほど一般的ではありませんが、特に機器のパイロットである場合は、待機要件に直面する可能性があります。これを念頭に置いて、次の記事は、方位角ビーコン(AR)、距離計ビーコン(RL)、無指向性無線標識(NR)などの航空機搭載ナビゲーション機器の使用方法を知っていると信じているプライベートパイロットの観点から書かれています(愚かです)。 )。
ステップ
 1 待機パターンのベンチマークを決定します。 航空交通管制サービス(ATC)は、「指定されたSKI交差点」から北に待つように指示するか、「ARファルコンビクター366から南東に待って左折する」などの特定の待機指示を出します。待機パターンの参照は、計器飛行方式から識別でき、通常、ビクター航空(方位角ビーコンナビゲーション機器間で事前に割り当てられた飛行ルート)、BPM(全方向性ビーコン)、またはNR(無指向性無線標識)の交差点にあります。
1 待機パターンのベンチマークを決定します。 航空交通管制サービス(ATC)は、「指定されたSKI交差点」から北に待つように指示するか、「ARファルコンビクター366から南東に待って左折する」などの特定の待機指示を出します。待機パターンの参照は、計器飛行方式から識別でき、通常、ビクター航空(方位角ビーコンナビゲーション機器間で事前に割り当てられた飛行ルート)、BPM(全方向性ビーコン)、またはNR(無指向性無線標識)の交差点にあります。  2 ホールディングエリアのコースをはっきりと想像してみてください。 この位置は、ATCに誘導された待機パターンベンチマークを基準にしています。 「ビクター8の西を期待する」または「クレムリン260°ラジアルを待つ」と言われることがあります。ホールディングエリアを飛行する前に、ARとHPのラジアルと方位角をよく理解する必要があります。ホールディングコースは、駅までの飛行経路です。これは常にステーションからのラジアルまたは方位角の逆数になります(たとえば、ラジアル260°は080°の保持コースになります)。すばやく識別するには、紙を1枚取り、保持パターンの基準点としてドットを配置し、半径または航空会社の方向に線を引いて保持領域を飛行します。方向矢印をステーションに向けて配置し、保持コースを決定します。
2 ホールディングエリアのコースをはっきりと想像してみてください。 この位置は、ATCに誘導された待機パターンベンチマークを基準にしています。 「ビクター8の西を期待する」または「クレムリン260°ラジアルを待つ」と言われることがあります。ホールディングエリアを飛行する前に、ARとHPのラジアルと方位角をよく理解する必要があります。ホールディングコースは、駅までの飛行経路です。これは常にステーションからのラジアルまたは方位角の逆数になります(たとえば、ラジアル260°は080°の保持コースになります)。すばやく識別するには、紙を1枚取り、保持パターンの基準点としてドットを配置し、半径または航空会社の方向に線を引いて保持領域を飛行します。方向矢印をステーションに向けて配置し、保持コースを決定します。 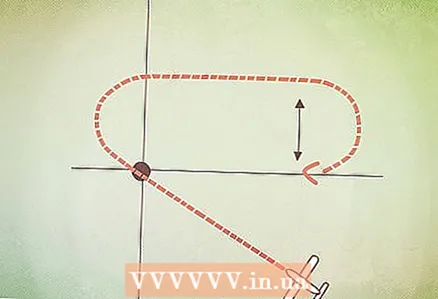 3 ホールディングエリアにフライトプランをレイアウトします。 参照とコースを取得したら、保持領域の飛行パターンを精神的または物理的に計画します。それが標準であるかどうかを判断する必要があります。標準の飛行パターンは右に曲がることを想定していますが、非標準の飛行パターンは左に曲がることを想定しています。飛行パターンが標準でない場合、これはグラフに左折の形で示されます。そうでない場合、航空交通管制サービスは「非標準の飛行パターン」または「左折」を送信します。ホールディングパターンの修正から始めて、示された方向(左または右)に180°回転し、ホールディングコースと平行に進み、さらに180°回転してホールディングコースに戻ります。これは有名な「レーストラック」またはホールディングパターンです。ホールディングコースに戻ります。これは有名な「競馬場」またはホールディングパターンです。
3 ホールディングエリアにフライトプランをレイアウトします。 参照とコースを取得したら、保持領域の飛行パターンを精神的または物理的に計画します。それが標準であるかどうかを判断する必要があります。標準の飛行パターンは右に曲がることを想定していますが、非標準の飛行パターンは左に曲がることを想定しています。飛行パターンが標準でない場合、これはグラフに左折の形で示されます。そうでない場合、航空交通管制サービスは「非標準の飛行パターン」または「左折」を送信します。ホールディングパターンの修正から始めて、示された方向(左または右)に180°回転し、ホールディングコースと平行に進み、さらに180°回転してホールディングコースに戻ります。これは有名な「レーストラック」またはホールディングパターンです。ホールディングコースに戻ります。これは有名な「競馬場」またはホールディングパターンです。  4 制御室に入るための正しいスキームを決定します。 待機パターンを入力する場所によっては、コントロールエリアの入力パターンに従う必要があります。ホールディングコースの左(非標準の飛行パターンの場合は右)に70°に近づいている場合は、ティアドロップ方式を使用します。右(または標準外の飛行パターンで左)に110°に近づくときは、パラレル方式を使用します。そして、残りの180°を使用して、直接入力します。ログイン方法を以下に示します。
4 制御室に入るための正しいスキームを決定します。 待機パターンを入力する場所によっては、コントロールエリアの入力パターンに従う必要があります。ホールディングコースの左(非標準の飛行パターンの場合は右)に70°に近づいている場合は、ティアドロップ方式を使用します。右(または標準外の飛行パターンで左)に110°に近づくときは、パラレル方式を使用します。そして、残りの180°を使用して、直接入力します。ログイン方法を以下に示します。 - 並行して。 セクター(a)のいずれかの側からホールディングパターンに近づくときは、平行なホールディングコースの方向に曲がり、適切な時間内に非ホールディング側に出発し(ポイント5を参照)、より多くのホールディングエリアに向かって曲がります。 180度でホールディングパターンに戻るか、ホールディングエリアでのコースエントリーを中断します。
- ドロップ型方式。 セクター(b)のいずれかの側から待機パターンに近づくときは、適切な時間、待機コースを30°オフにして待機側に回し、次に待機パターンに向かって回転して待機コースを中断します。
- 直接ログイン方法。 セクター(c)のいずれかの側からホールディングパターンフィックスに近づくときは、ランドマークに直接飛んで、ホールディングエリアをたどるように曲がります。
 5 円を計算します。 このエリアは飛行する必要があるため、平均海抜4200 m(MSL)の高度以下で飛行する場合は、帰路が1分長くなり、MSLが4200mを超える場合は1.5分長くなります。基準点で、保持領域(標準または非標準)に示されている方向に標準パターン(3°/秒)で180°回転します。基準点から離れている場合(または、基準のトラバースを特定できない場合は、反転を終了した後)、外側の円のカウントを開始します。 1分後(4200 mを超える場合は1分半)、同じ方向にさらに180度回転して、ホールドコースを中断します。基準点に到達するまで逆円を数えます。風が弱い場合とない場合、これにはそれぞれ1分または1分半かかります。それ以外の場合は、適切な時間内に内側の円を完成させるために外側の円を調整する必要があります。たとえば、高度3600 mで飛行していて、1分かかった外側の円を完了してから内側の円を完了するのに45秒かかることに気付いた場合、次に1分で外側の円を完了します。 15秒で。同様に、内側の円が完成するのに1分30秒かかる場合は、外側の円をさらに30秒短くします。
5 円を計算します。 このエリアは飛行する必要があるため、平均海抜4200 m(MSL)の高度以下で飛行する場合は、帰路が1分長くなり、MSLが4200mを超える場合は1.5分長くなります。基準点で、保持領域(標準または非標準)に示されている方向に標準パターン(3°/秒)で180°回転します。基準点から離れている場合(または、基準のトラバースを特定できない場合は、反転を終了した後)、外側の円のカウントを開始します。 1分後(4200 mを超える場合は1分半)、同じ方向にさらに180度回転して、ホールドコースを中断します。基準点に到達するまで逆円を数えます。風が弱い場合とない場合、これにはそれぞれ1分または1分半かかります。それ以外の場合は、適切な時間内に内側の円を完成させるために外側の円を調整する必要があります。たとえば、高度3600 mで飛行していて、1分かかった外側の円を完了してから内側の円を完了するのに45秒かかることに気付いた場合、次に1分で外側の円を完了します。 15秒で。同様に、内側の円が完成するのに1分30秒かかる場合は、外側の円をさらに30秒短くします。
基準点から直接離れるまで、外側の円のカウントを開始しないでください。 6 あなたの速度を制御します。 最小保持高さと1800mの間の保持領域の最高速度は、スケジュールに別段の指示がない限り、またはディスパッチサービスから通知されない限り、200インストルメントクラスターノット(SCP)です。 1801mから4200mの間の高度で230ソフトスターターを超えない速度で飛行し、4200mを超える高度で265ソフトスターターを超えない速度で飛行します。
6 あなたの速度を制御します。 最小保持高さと1800mの間の保持領域の最高速度は、スケジュールに別段の指示がない限り、またはディスパッチサービスから通知されない限り、200インストルメントクラスターノット(SCP)です。 1801mから4200mの間の高度で230ソフトスターターを超えない速度で飛行し、4200mを超える高度で265ソフトスターターを超えない速度で飛行します。
方法1/2:風補正
 1 風補正を考慮して、正しい時間内に内側の円を完成させます。 内側の円が本来よりも短い場合は、その差の分だけ外側の円を増やします。内側の円が長い場合は、余分な時間だけ外側の円を短くします。たとえば、4200 m未満で飛行する場合、内側の円を完了するのに1分45秒かかり、外側の円を15秒カウントします(1分から内側の円の追加の45秒を引いたもの)。
1 風補正を考慮して、正しい時間内に内側の円を完成させます。 内側の円が本来よりも短い場合は、その差の分だけ外側の円を増やします。内側の円が長い場合は、余分な時間だけ外側の円を短くします。たとえば、4200 m未満で飛行する場合、内側の円を完了するのに1分45秒かかり、外側の円を15秒カウントします(1分から内側の円の追加の45秒を引いたもの)。 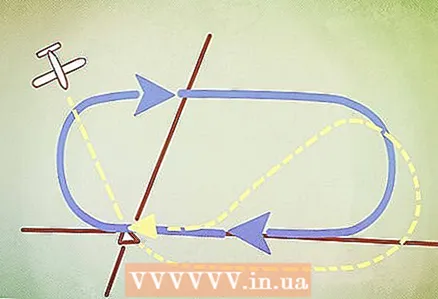 2 外側の円の風のドリフトのオフセットを3倍にします。 内側の円の弾道を維持するために10°のドリフトオフセットがある場合は、30°のオフセットで外側の円を飛ばします。標準のコーナリングフィギュアに固執します。
2 外側の円の風のドリフトのオフセットを3倍にします。 内側の円の弾道を維持するために10°のドリフトオフセットがある場合は、30°のオフセットで外側の円を飛ばします。標準のコーナリングフィギュアに固執します。
方法2/2:レンジファインダービーコンで待機
 1 一部の保管エリアでは、測距ビーコンまたはGPSベースの移動距離測定装置(TRD)を使用する必要があります。 飛行操作の基本は、RLに沿った距離が基準点として使用されることを除いて、上記と同じです。
1 一部の保管エリアでは、測距ビーコンまたはGPSベースの移動距離測定装置(TRD)を使用する必要があります。 飛行操作の基本は、RLに沿った距離が基準点として使用されることを除いて、上記と同じです。 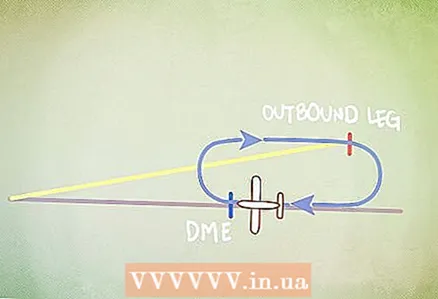 2 適切な方法(ドロップ型、平行、または直接)を使用して領域を入力します。
2 適切な方法(ドロップ型、平行、または直接)を使用して領域を入力します。 3 DR / AIRPランドマークで外側の円に向きを変え始めます。
3 DR / AIRPランドマークで外側の円に向きを変え始めます。 4 円を数える代わりに、外側の円を完成させ、必要な距離で内側の円に入るように回します。 たとえば、ナビゲーション機器への飛行中にランドマークで10 ARを期待し、航空交通管制の指示に従って、5マイル(8 km)を周回している場合、15マイル(24 km)で外側の円を完成させます。 )AR(上のチャートを参照)。航空機をナビゲーション機器から遠ざける場合は、基準点から円の長さを差し引く必要があります。たとえば、ランドマークに20 ARが予想され、航空機をナビゲーション機器から遠ざける場合は、25ARで外側の円を完成させます。
4 円を数える代わりに、外側の円を完成させ、必要な距離で内側の円に入るように回します。 たとえば、ナビゲーション機器への飛行中にランドマークで10 ARを期待し、航空交通管制の指示に従って、5マイル(8 km)を周回している場合、15マイル(24 km)で外側の円を完成させます。 )AR(上のチャートを参照)。航空機をナビゲーション機器から遠ざける場合は、基準点から円の長さを差し引く必要があります。たとえば、ランドマークに20 ARが予想され、航空機をナビゲーション機器から遠ざける場合は、25ARで外側の円を完成させます。
チップ
- 特定の設定で向きを上げるには、待機パターンを紙にすばやくスケッチします。
警告
- 地面やその他の障害物との衝突を避けるために、すべての操作は保持側で実行する必要があります。



